
毕业进行时—-工学院机械设计制造及其自动化专业答辩实录
2020年5月6日、7日下午1:30-4:30分,机制教研室组织了2016级毕业生89人进行了毕业答辩。答辩共分成四组,每组用两个半天的时间进行答辩。
本次答辩采用腾讯会议+录屏软件的方法进行。论文题目涉及广泛,有工业机械设计类,比如机械手设计、液压升降台设计、减速箱设计,有自动化类比如自动勘探车的设计、自动窗帘设计,有机电智能控制类比如智能药箱设计、Wifi智能遥控车设计、无人驾驶控制技术、扫地机器人等。学生们准分充分,都做了精美的PPT来展示自己的设计,同时向老师们展示自己的论文和图纸或程序。答辩老师根据学生的设计也都提出了非常专业的问题,并给出了专业的建议,让学生能更好的完善自己的设计。
紧张的两个半天之后,所有学生顺利答辩完毕。总体来看大部分学生们都为毕业设计付出了很大的努力,将大部分四年所学融会贯通了起来,设计都达到了本科生的毕业设计要求。有些同学的设计虽然不完美,但是已经有了一定的实用性和创新性,可以称之为本科生中的佼佼者。总之,毕业答辩圆满落幕,后续的工作也在紧张进行中,预祝所有毕业生顺利毕业,顺利进入社会找到理想的工作!

机制16-2班李哲萱同学针对北京地铁人挤无座的现实情况,构思将座椅由固定式改进为折叠式,以便合理地利用车厢空间。于是运用专业课程所学知识,使用了机械连杆机构、进行了应力分析、采用了PLC自动控制,动手组装了“地铁座椅智能系统”。该设计去年获“第六届台达杯高校自动化设计大赛”一等奖,而其中关键件“可调试斥力监测器”获国家实用新型专利。
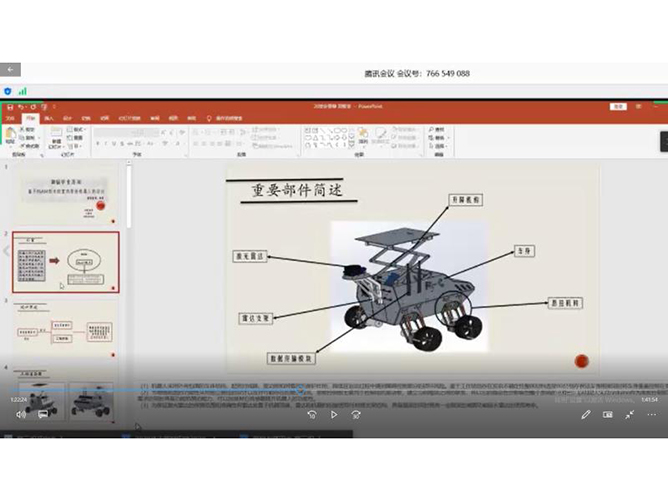
刘智华 《基于SLAM技术的室内测绘机器人的设计》答辩截图
机制16-3班谢众同学则设计了一款“基于ROS的智能搬运机器人”,该机器人包括移动平台以及搬运装置两个部分,在军事、消防、仓储运输,以及新冠病毒高污染病区无人化机器取送物品等工作,经改装后能完成某些高危特种工作,,有着广阔的应用前景!在他的设计中既有五自由度机械手臂完成夹取搬运动作的功能设计,又有基于ROS设计的机器人自主移动平台实现了自主路径规划导航。二者结合就完成了无人化仓储运输的基本设计功能要求,是高新技术的一次精彩综合运用。